

Early Access
Display Method:
, Available online
Abstract:









, Available online
Abstract:

, Available online
Abstract:
, Available online
Abstract:









, Available online
Abstract:




, Available online
Abstract:
, Available online
Abstract:
, Available online
Abstract:




, Available online
Abstract:

, Available online
Abstract:
, Available online
Abstract:



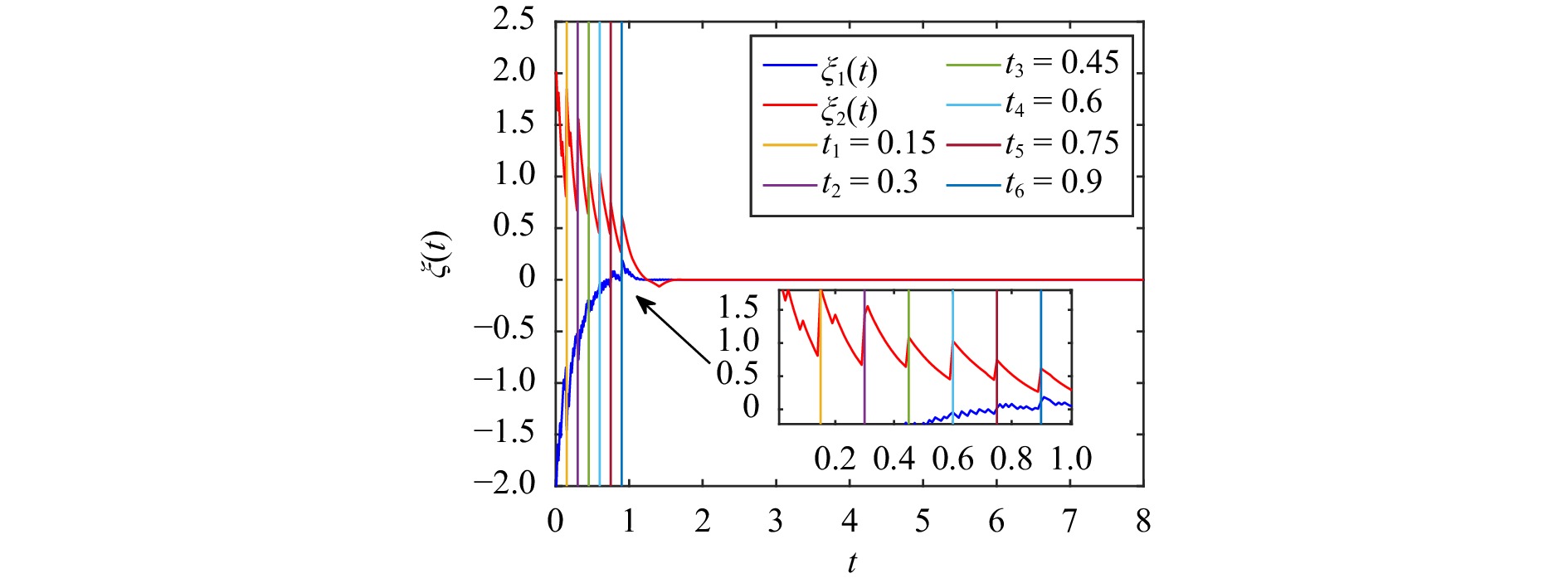
Distributed Event-Triggered Nash Equilibrium Seeking for Aggregative Game With Second-Order Dynamics
, Available online , doi: 10.1109/JAS.2024.124830
Abstract:

















, Available online
Abstract:











, Available online
Abstract:
, Available online
Abstract:







, Available online
Abstract:



, Available online
Abstract:













, Available online
Abstract:
, Available online
Abstract:



, Available online
Abstract:
, Available online
Abstract:

















 E-mail Alert
E-mail Alert


